Технические характеристики токоприемников



Система штангоулавливания состоит из:
- двух токоприемников с пневмоприводом;
- стойки пневмоаппаратуры;
- блока управления;
- механизма укладки шнура.
Токоприемники оборудованы пневмоцилиндрами, которые обеспечивают опускание штанги при ее сходе с контактного провода.На основании токоприемника установлены два бесконтактных датчика для контроля положения штанги в верхнем и нижнем положениях. Регулировка высоты срабатывания датчиков производится поворотом шайбы на оси. Регулировка высоты опуска ния штанги цилиндром производится вращением переходника между цилиндром и маятником. После регулировки переходник застопорить гайками.
На стойке пневмоаппаратуры закреплены два пневмораспределителя и блок управления. Пневмораспределители управляют пневмоцилиндрами перемещения штанги. Кинематика установки пневмоцилиндра позволяет опускать штангу в вертикальной плоскости со стабилизацией по горизонтали. Стойка пневмоаппаратуры установлена на крыше рядом с токоприемниками.
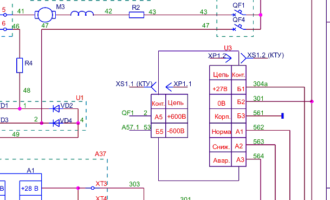
Блок управления служит для включения и отключения пневмоцилиндров. Схема блока управления обеспечивает следующий алгоритм работы распределителей. В момент схода штанги с контактной сети в систему управления поступают два сигнала: сигнал отсутствия напряжения 600 В и сигнал от концевого выключателя максимальной высоты штанги, в результате чего система управления подает напряжение на пневмораспределители цилиндров, и вследствие этого штанги опускаются параллельно оси троллейбуса и фиксируются на определенной высоте.
Для приведения системы штангоулавливания в исходное состояние необходимо обе штанги установить под лиры, при этом выключатели минимальной высоты штанг подают сигналы на блок управления, который отключает пневмораспределители. После возврата в исходное состояние штанги можно установить на контактный провод.
Аналогично работает система при подаче сигнала принудительного съема штанг.
Работой системы штангоулавливания управляет блок управления штангоуловителем, на который подаются входные сигналы принудительного съема штанг, блока контроля напряжения, датчиков верхнего уровня штанг SQ1 (правая), SQ2 (левая) и датчиков нижнего уровня штанг SQ3 (правая), SQ4 (левая). От блока управления подаются выходные сигналы на включение катушек пневмораспределителей Y3 и Y4, а также напряжение питания конечных выключателей SQ1 — SQ4.
Как вам статья?